Publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
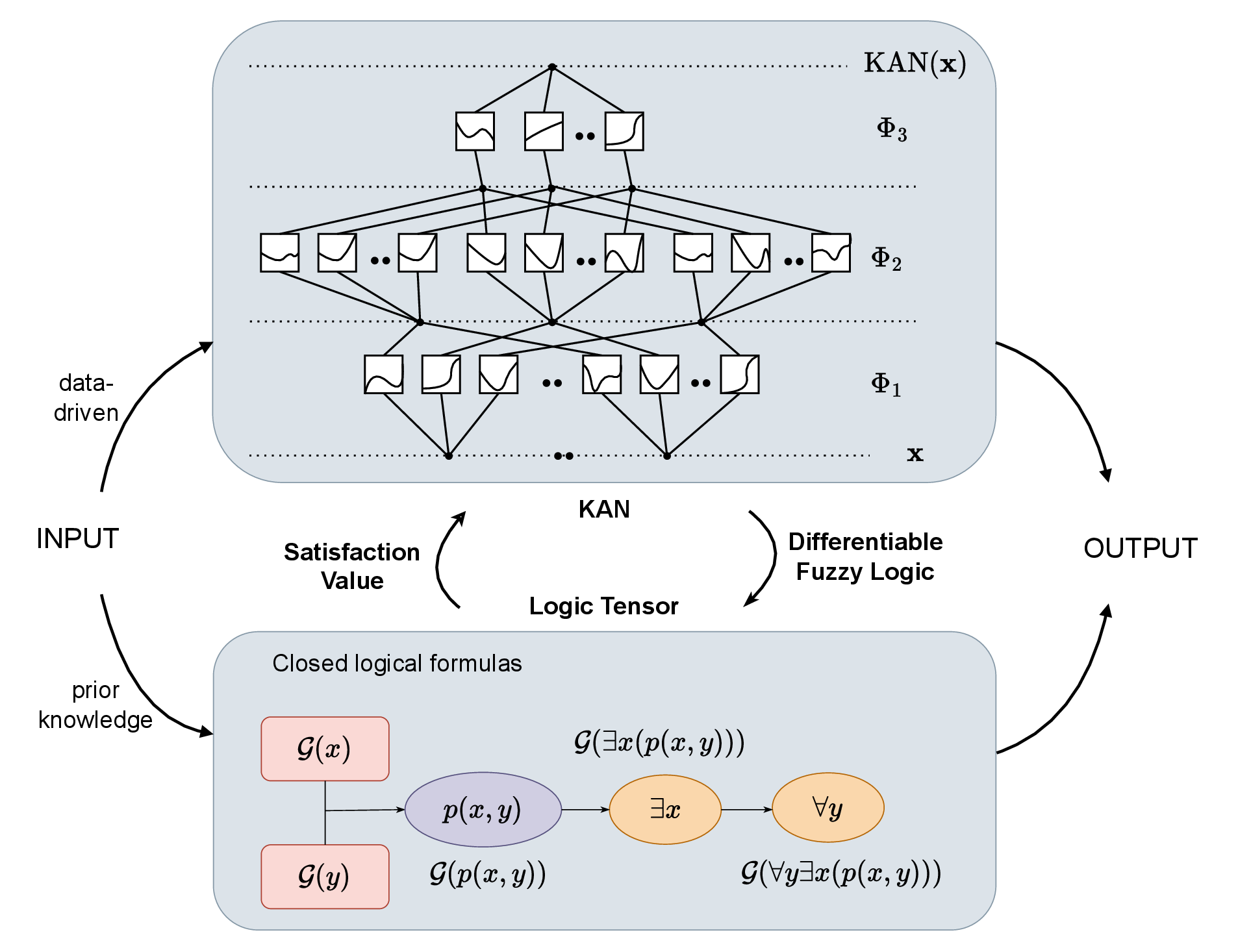
- Bridging Data and Knowledge: A Neurosymbolic Framework for Reliable Network AnalysisIn 2025 IEEE Global Communications Conference (GlobeCom), 2025